

在机械设计中,减速机是一种特殊的机构。它可以将电动机的高速运动降至需要的低速功率输出。不同的减速机有不同的工作原理和应用领域。rv减速机和谐波减速机是其中两种常见的减速机,它们有着优异的性能和广泛的应用。但是,各自的精度又有所不同。那么,我们该如何在两者之间做出选择呢?
首先,rv减速机是一种传动装置,具有高扭矩、低振动、低噪音等优点。它的减速比可以非常大,达到100:1或更高。rv减速器有很多类型,如行星减速机、圆锥齿轮减速机、直线齿轮减速机等。rv减速机的主要精度来自工艺和加工的准确性,因此,这种减速机可以达到很高的精度。一般来说,rv减速机的精度可以达到5-8弧分,这意味着它可以追求更高的输出精度,适用于精细的机械制造领域。
相反,谐波减速机也是一种非常优秀的减速机。如其名,它采用谐波传动原理,通过滑动摆杆和柔性齿轮的同心作用,将驱动轴高速旋转的动力转换为输出轴的低速运动。谐波减速机也有很多类型,如标准型、轻型、超轻型等。谐波减速机的主要精度来自于滑动摆杆和外齿轮的精度,因此,这种减速机具有非常高的输出精度。一般来说,谐波减速机的精度可以达到1-3弧分,这意味着它可以适应非常高的精度要求,例如航空航天领域。
但是,在实际生产中,我们应该如何在精密rv减速机和谐波减速机之间做出选择呢?
一般来说,在非高精度要求的普通场合下,例如工业自动化、机床加工等领域,可以使用rv减速机。它可以提供较高的输出精度,同时成本相对较低,可以降低整体的生产成本。而在高精度领域,例如航天领域、高精度机床等领域,建议选择谐波减速机。虽然成本较高,但它可以提供非常高的输出精度和精确度,保证整个生产过程的质量和稳定性。
综上所述,国产rv减速机和谐波减速机在不同的应用领域都具有很好的性能和优点。在选择时,应根据具体的生产领域和需求,综合考虑各种因素,从而选择最适合自己的减速机和工具设备。下面我们再来看看RV减速器的构造与原理
RV减速器,简称旋转矢量(Rotary Vector)减速器,包括前级的行星齿轮减速器,与后级的摆线针轮减速器,应用场景主要为工业机器人、数控机床、医疗检测设备、卫星接收系统等。
构造及工作过程:
RV减速器通常包含两级减速装置,具体图示如下:
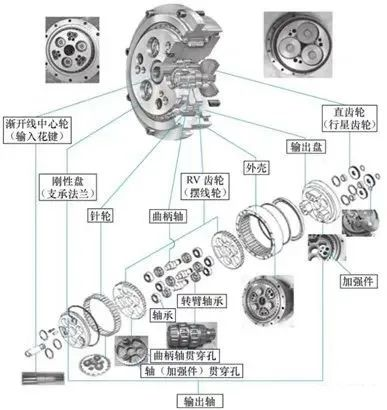
(一)第一级减速装置为行星齿轮减速器,由输入齿轮和行星轮组成。其运动原理如下:
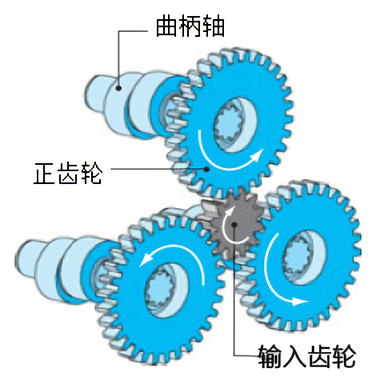
第一,输入齿轮与电机相连,在电机的旋转作用下,输入齿轮随之同步旋转,输入齿轮与电机的转速保持一致;
第二,输入齿轮转动带动2-3个行星轮同时转动,由于行星轮的齿数较多、形状较大,因此行星轮的转动速度慢于输入齿轮,实现第一级减速,一级减速比为行星轮与输入齿轮的齿数之比;
(二)曲柄轴前后端分别与行星轮和摆线轮相连,在行星轮旋转后,曲柄轴以相同的转速旋转;
(三)第二级减速装置为摆线针轮减速器,主要由滚动轴承、摆线轮、针轮组成,其运动原理如下:
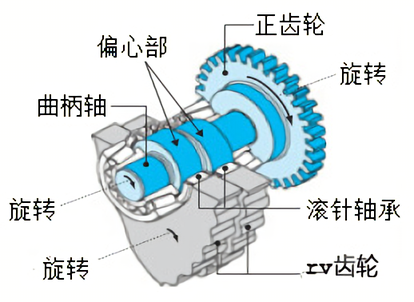
第一,如上图所示,曲柄轴上含有偏心部,偏心部外嵌滚针轴承,与滚动轴承相连接,在曲柄轴的偏心运动下,摆线轮在滚动轴承的作用下随之运动;
第二,某品牌的RV减速器通常采用“2-3个偏心部+摆线轮”的设计,摆线轮间存在一定相位差,2个摆线轮相位差为180度,3个摆线轮相位差为120度,用于抵消运动过程中的径向跳动,提升精度的同时,提高安全系数和抗冲击强度;
第三,在外壳内侧仅比摆线轮多一个齿的针轮,以与摆线轮同等的齿距排列。
曲柄轴旋转一圈,摆线轮与针轮接触的同时,做一次偏心运动(曲柄运动),在针轮保持固定的结果上,沿着与曲柄轴的旋转方向相反的方向,摆线轮旋转一个齿轮距离,因此摆线轮旋转速度慢于曲柄轴的偏心部,实现第二级减速。
三、RV与谐波减速器对比
机器人RV减速器可承受的扭矩较大、结构刚性好,但精度要低于谐波减速器。因此在工业机器人的应用中,RV减速器一般用在重负载的位置,如机座、大臂、肩部等,而将谐波减速器放置在小臂、腕部或手部,其中协作机器人的六轴均为谐波减速器。






