差分编码器和编码器作为两种常见的角位移传感器,在工业应用中扮演着关键角色。虽然它们在名称上有相似之处,但在工作原理、性质和特点方面存在显著区别。通过深入了解它们的差异,我们能更好地理解在不同场景下的应用和选择。本文将对差分编码器和编码器的区别进行详细剖析。

1. 工作原理的差异
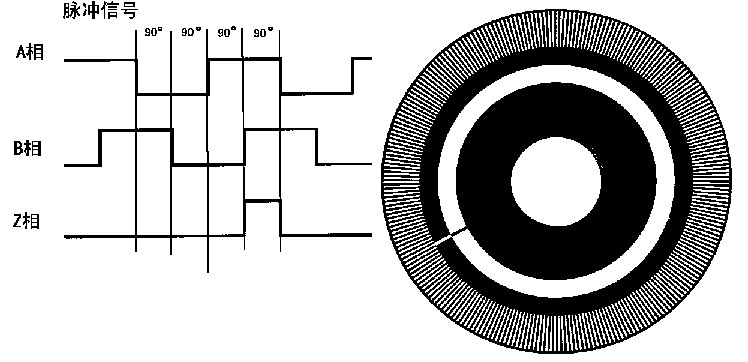
首先,差分编码器和编码器在工作原理上存在显著不同。差分编码器是一种通过感应缝隙获得信号脉冲的传感器。它通过将脉冲信号送到计数器进行计数,从而测得角度,并判断旋转方向。另一方面,编码器通过Z相脉冲表示零位参考位,A、B两相相差90度。通过比较A相和B相的前后顺序,可以确定编码器的正转或反转方向。因此,它们在基本的工作原理上存在明显区别。
2. 性质上的差异
其次,差分编码器通常是一种增量式编码器。增量式编码器将位移转换为周期性的电信号,然后将这个电信号转化为计数脉冲,用脉冲数量表示位移的大小。与之不同,编码器的工作原理可分为增量式和绝对式两类。因此,性质上的区别主要体现在它们是如何将物理位移转换为电信号的。
3. 特点的不同
最后,差分编码器和编码器在特点上也存在差异。编码器的码盘材料有玻璃、金属、塑料等。玻璃码盘具有高精度和热稳定性,金属码盘相对坚固,而塑料码盘成本较低。相比之下,差分编码器的特点是在转轴旋转时,产生相应的脉冲输出,利用后部的判向电路和计数器实现旋转方向的判别和脉冲数量的增减。此外,差分编码器还可通过Z信号发出一个脉冲,作为参考机械零位,实现多圈无限累加和测量。
通过深入研究差分编码器和编码器的区别,我们能够更好地理解它们的适用场景和选择条件。在实际应用中,根据具体需求选择合适的传感器是确保系统正常运行的关键一步。希望本文对于读者在差分编码器与编码器选择过程中提供有益的指导。