增量型编码器是广泛用于工业控制和测量应用的关键传感器之一。它能够将机械运动转换为数字信号,提供有关位置和速度的关键信息。本文将深入探讨增量型编码器的工作原理,以及在选择和使用时需要注意的事项。
增量型编码器的工作原理
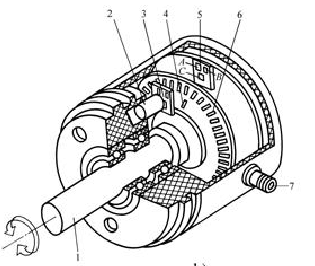
增量型编码器的工作原理基于光学信号转换。它由一个旋转的码盘和一个固定的感光元件组成。码盘上刻有许多线,这些线通过光源照射到感光元件上,当码盘旋转时,光线被遮挡,感光元件会生成电信号。这些电信号经过电路处理后,产生脉冲信号。

通常,增量型编码器提供两路具有90度相位差的方波信号,分别称为A和B通道。这两个通道的相位差决定了测量间距。此外,编码器还可以提供零位信号,通常称为Z通道,用于标识位置的零点。
在实际应用中,A和B通道的信号用于确定旋转方向和测量角度或位置的变化。通过对这两个信号进行相位差分析,可以判断是顺时针旋转还是逆时针旋转,并计算出角度或位置的变化。
增量型编码器的使用注意事项
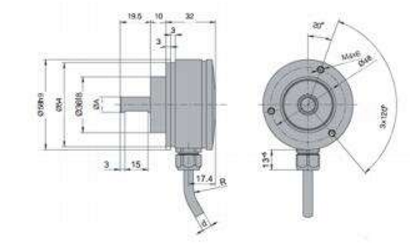
选型依据分辨率:增量型编码器的分辨率取决于码盘上线的数量。更多的线意味着更高的分辨率。在选择编码器时,要根据具体应用的需求来决定分辨率,以确保获得足够精确的位置或速度信息。
信号处理:编码器通常输出TTL电平的信号,其中A脉冲在前,B脉冲在后,相位差为90度。在使用前,要仔细阅读编码器的产品说明,以了解信号的正确连接和处理方式。
数据采集:根据您的控制系统,选择适当的数据采集方法。对于PLC,可以选择高速计数模块;对于工控机,可以使用高速计数板卡;对于单片机,建议使用带有光电耦合器的输入端口,以确保数据采集的准确性和稳定性。
信号设置:建议使用B通道信号作为顺向(前向)脉冲,A通道信号作为逆向(后向)脉冲,Z通道信号用于零位标定。这有助于正确识别旋转方向和确保位置测量的准确性。
安装和调试:在安装增量型编码器时,要确保安装场地干净,并特别注意电路连接的质量。正确安装后,需要进行调试,以防在实际操作中影响数据处理。
总之,增量型编码器是工业自动化和机械控制系统中不可或缺的传感器之一。了解其工作原理和使用注意事项可以帮助您更好地选择和应用增量型编码器,确保系统的稳定性和性能。无论是在生产线上还是在机器人控制中,增量型编码器都扮演着关键的角色,帮助实现精准的位置和速度控制。