伺服电机驱动原理是什么?伺服电机跑位原因及调试解决方法介绍!
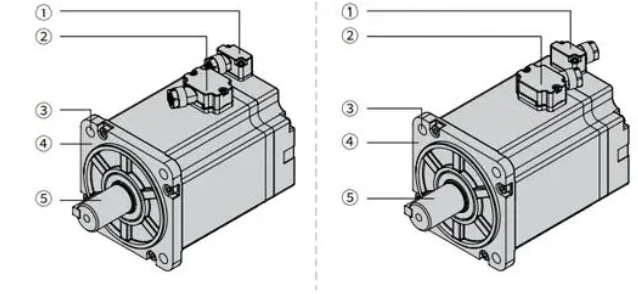
伺服电机是一种高性能的电动机,广泛应用于工业自动化领域。它通过闭环控制系统实现对位置、速度和扭矩的精确控制,能够提供高精度、高可靠性的运动控制。然而,在伺服电机的驱动过程中,可能会遇到跑位的问题,这会影响到系统的稳定性和准确性。本文将介绍伺服电机的驱动原理以及可能导致跑位问题的原因,并提供相应的解决办法。

伺服电机的驱动原理:
伺服电机是一种闭环控制系统,其基本原理是利用反馈信号进行控制。控制器输出一系列差分信号,这些信号包含了位置比照、速度控制和扭矩控制等信息。
位置比照:通过比较反馈信号和设定的位置信号,可以计算出电机的转动角度,从而实现位置控制。
速度控制:通过调节占空比和脉冲频率,控制电机的转速。
扭矩控制:通过控制电流信号,实现对电机的扭矩控制。
伺服电机的驱动过程涉及到多个参数和控制环节,需要精确调节才能实现稳定和准确的运动。
伺服电机跑位的原因及解决办法:
伺服电机在运行过程中,可能会出现跑位的问题,导致电机失控或无法按预期运动。以下是一些可能导致跑位的原因及相应的解决办法:
外部干挠导致的飞车:
在闭环控制系统中,外部布线问题或控制器内部参数设置错误可能导致电机高速运行,这种情况被称为“飞车”。解决方法是仔细检查布线,包括开关电源、电动机等,逐步排查并解决问题。
伺服电机零偏导致的跑位:
如果伺服电机回零不准确,可能会产生零偏,导致电机的位置控制出现误差。解决方法是对伺服电机进行准确的回零设置,确保零位准确无误。
部位误差未消除导致的飞车:
在部分控制环节,如部位单脉冲命令下,伺服电机可能存在部位误差,如果在操纵过程中没有及时消除,当消除扭矩限制后,伺服控制系统会迅速清除误差并以较大速度运作,可能导致飞车。解决方法是合理设置扭矩限制,并及时消除部位误差。
外部布线错误导致的跑位:
伺服电机的部位环布线必须正确,如果A、A-或B、B-信号接错,会导致伺服电机的反馈控制出现问题,进而产生跑位。解决方法是仔细检查部位环布线,确保A、A-和B、B-信号正确连接。
综上所述,伺服电机的驱动原理是利用闭环控制系统实现位置、速度和扭矩的精确控制。在伺服电机的驱动过程中,可能会遇到跑位的问题,其原因可能涉及到外部布线错误、部位误差、伺服电机的回零设置等。解决这些问题的关键在于仔细调试主要参数,保证伺服电机的正常运行。正确的调试和维护伺服电机,能够确保系统的稳定性和准确性,提高工业自动化生产的效率和质量。