多圈绝对值编码器有什么特点?绝对式编码器的相位对齐方式介绍!
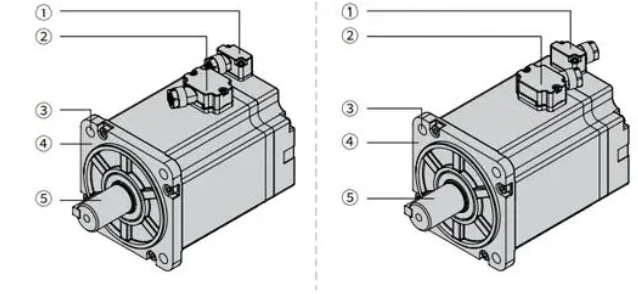
多圈编码器是在单圈编码器的基础上通过机械传动原理,利用钟表齿轮机械原理结构制作而成。单圈旋转编码器只能记录一圈中的每个角度对应的数值,无法记圈数;多圈旋转编码器不仅能记录一圈中的每个角度对应的数值,还能记录旋转了几圈。

多圈绝对值编码器是在单圈编码器的基础上通过机械传动原理,利用钟表齿轮机械原理结构制作而成。当中 心光栅码盘旋转时,通过齿轮传动另一组码盘(或多组齿轮,多组码盘),在单圈编码的基础上再增加圈数的编码,以扩大编码器的测量范围,它同样是由机械位置确定编码,每个位置编码唯 一不重复,而无需记忆。多圈编码器另一个优点是由于测量范围大,实际使用往往富裕较多,这样在安装时不必要费劲找零点,将某一中间位置作为起始点就可以了,从而大大简化了安装调试难度。
多圈绝对值编码器信号输出有并行输出、串行输出、总线型输出、变送一体型输出。
1.并行输出:
多圈绝 对值编码器输出的是多位数码(格雷码或纯二进制码),并行输出就是在接口上有多点高低电平输出,以代表数码的1或0,对于位数不高的绝 对编码器,一般就直接以此形式输出数码,可直接进入PLC或上位机的I/O接口,输出即时,连接简单。
但是并行输出有如下问题:
1)必 须是格雷码,因为如是纯二进制码,在数据刷新时可能有多位变化,读数会在短时间里造成错码。
2)所有接口必 须确保连接好,因为如有个别连接不良点,该点电位始终是0,造成错码而无法判断。
3)传输距离不能远,一般在一两米,对于复杂环境,zui好有隔离。
4)对于位数较多,要许多芯电缆,并要确保连接优良,由此带来工程难度,同样,对于编码器,要同时有许多节点输出,增加编码器的故障损坏率。
串行SSI输出:
串行输出就是通过约定,在时间上有先后的数据输出,这种约定称为通讯规约,其连接的物理形式有RS232、RS422(TTL)、RS485等。由于多圈绝 对值编码器好的厂家都是在德国,所以串行输出大部分是与德国的西门子配套的,如SSI同步串行输出。
SSI接口(RS422模式),以两根数据线、两根时钟线连接,由接收设备向编码器发出中断的时钟脉冲,绝 对的位置值由编码器与时钟脉冲同步输出至接收设备。由接收设备发出时钟信号触发,编码器从高位(MSB)开始输出与时钟信号同步的串行信号。
串行输出连接线少,传输距离远,对于编码器的保护和可靠性就大大提高了。一般高位数的绝 对编码器都是用串行输出的。
现场总线型输出现场总线型编码器是多个编码器各以一对信号线连接在一起,通过设定地址,用通讯方式传输信号,信号的接收设备只需一个接口,就可以读多个编码器信号。总线型编码器可以节省连接线缆、接收设备接口,传输距离远,在多个编码器集中控制的情况下还可以大大节省成本。
绝对式编码器的相位对齐方式!
绝对式编码器的相位对齐对于单圈和多圈来说,差别不大,其实都是在一圈内对齐编码器的检测相位与电机电角度的相位。绝 对值编码器广泛应用于水利、轻工、机械、冶金、纺织、石油、航空、航海等行业。具体到工程项目类如:回转台、闸门开度、阀门开度、提升机吊车定位、行车定位、物位测量、导弹发射角度定位、导弹空气舵测量、电子经纬仪等高精度测量定位场合。实现编码器和电机的相位对齐,方法如下:
1、用一个直流电源(向电子设备提供功率的装置)给马达的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;
2、用示波器观察绝 对编码器的高计数位电平信号;
3、调整编码器转轴与马达轴的相对位置;
4、一边调整,一边观察高计数位信号的跳变沿,直到跳变沿准确出现在电机轴的定向平衡位置处,锁定编码器与电机的相对位置关系;
5、来回扭转马达轴,撒手后,若电机轴每次自由回复到平衡位置时,跳变沿都能准确复现,则对齐有效。绝 对值编码器码值”跟被测“位置”对应是唯 一的,具有“断电记忆”功能,无旋转测量积累误差,在“一个循环”内用于测控领域比增量编码器优越,可加前减速箱调节量程。拉绳位移传感器充分结合了角度传感器和直线位移传感器的优点,成为一款安装尺寸小、结构紧凑、测量行程大、精度高的传感器,行程从几百毫米至十几米不等。
存储编码器随机安装在电机轴上后实测的相位,具体方法如下:
1、将编码器随机安装在电机上,即固结编码器转轴与电机轴,以及编码器外壳与电机外壳;
2、用一个直流电源(向电子设备提供功率的装置)给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;
3、用伺服驱动器读取绝 对编码器的单圈位置值,并存入编码器内部记录电机电角度初始相位的EEPROM中;
4、对齐过程结束。
由于此时电机轴已定向于电角度相位的-30度方向,因此存入的编码器内部EEGOOGLE PROM中的位置检测(检查并测试)值就对应电机电角度的-30度相位。此后,驱动器将任意时刻的单圈位置检测数据与这个存储值做差,并根据电机对数进行必要的换算,再加上-30度,就可以得到该时刻的电机电角度相位。
这种对齐方式需要编码器配合方能实现,这种对齐方法的一大好处是,只需向电机绕组提供确定相序和方向的转子定向电流(Electronflow),无需调整编码器和电机轴之间的角度关系,因而编码器可以以任意初始角度直接安装在电机上,且无需精细,甚至简单的调整过程,操作简单,工艺性好。