增量编码器:
增量编码器轴旋转时,有相应的相位输出。 其旋转方向的判别和脉冲数的增减由后部的判定电路和计数器实现。 其计数起点可以任意设定,可以进行多圈的无限累积测量。 此外,也可以每转发送1脉冲的z信号,作为参考机械零。 脉冲被固定,需要提高分辨率时,可以利用带90度相位差a、b的2个信号,倍增原脉冲数。
绝 对值编码器:
绝 对值编码器轴旋转变压器时,位置有一对一对应的代码(二进制、BCD代码等)输出,可以根据代码尺寸的变更判别正反方向和位移的位置,不需要判别电路。 即使在停电或关机后接通电源进行重新测量,也有绝 对零代码,可以正确读取停电或关机位置的代码,正确找到零代码。 一般来说,绝 对值编码器的测量范围为0~360度,但即使是特殊形式也可以进行多圈测量。
正弦波编码器:
正弦波编码器也是增量编码器,主要区别在于输出信号是正弦波模拟信号而不是数字量信号。 其出现主要是为了满足电气领域的需要,用作电动机的反馈检测元件。 与其他系统相比,如果需要提高动态特性,可以采用此编码器。
为了确保良好的电动机控制性能,编码器的反馈信号需要能够供给大量的脉冲,特别是在转速低的情况下,在以往的增量编码器中产生大量的脉冲,在很多方面存在问题,电动机高速旋转, 在这种情况下,处理向伺服电动机的信号所需的带宽(例如,编码器旋转1圈的脉冲为10000 )容易超过MHz的阈值。 另一方面,通过采用模拟信号,大幅减少了上述工作量,实现了模拟编码器的大量脉冲。 这感谢正弦和馀弦信号的插补法,提供旋转角度的计算方法。 这个方法可以得到基本正弦波的高倍增加。 例如,每转从1024个正弦波编码器,每转得到超过1024,000脉冲的脉冲。 接收这个信号所需的带宽只有100KHz以上就足够了。 插值倍频须在二次系统中进行。
增量旋转编码器特点是什么?
特点:通过内部两个光敏接受管转化其角度码盘的时序和相位关系,得到其角度码盘角度位移量增加(正方向)或减少(负方向)。在接合数字电路特别是单片机后,增量式旋转编码器在角度测量和角速度测量较绝 对式旋转编码器更具有廉价和简易的优势。
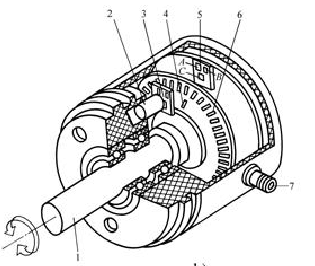
增量式编码器是直接利用光电转换原理输出三组方波脉冲和两组脉冲相位差90o从而可方便地判断出旋转方向,而Z相为每转一个脉冲,用于基准点定位。它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。
相比传统的增量式光学编码器,增量式磁性编码器不需要有复杂的码盘和光源,元器件数量更少,检测结构更加简单,同时霍尔元件本身也具有许多优点。例如:结构牢固,体积小,重量轻,寿命长,耐震动,不怕灰尘,油污,水汽及盐雾等的污染腐蚀。