绝对值编码器有哪些常见输出信号方式?绝对值编码器在机械臂上的应用介绍!
绝对值编码器内部由于是多码道读数,数值是以2的0次方到2的n-1次方的编码,故它的输出不同于增量的脉冲输出,以物理器件分类来看,可分为并行输出、串行同步输出、串行异步总线式输出、转换模拟量输出等。
一.并行输出
多少位(码道)绝对值编码器1或0,物理器件与增量值编码器相似,有集电极开路NPN、PNP、差分驱动、推挽HTL等等,分高电平有效或低电平有效来针对PNP或NPN的物理器件格式。推挽式输出信号电压较高,电压范围宽,器件不易损坏,与PNP和NPN都兼容,并行输出的应尽量选用这种输出,并行输出一般以格雷码的数学形式输出,所以在过去就直接被称为格雷码编码器了。
对于位数不高的绝对值编码器,一般就直接以此形式输出数码,可直接进入后续设备如PLC或上位机的I/O接口,有多少位就要连接多少个点,直接读取电平的高低,输出即时,连接简单。但是并行输出有如下问题:
1、需要是格雷码,因为如是纯二进制码,在数据刷新时可能有多位变化,读数会在短时间里造成错码。
2、占用多点接口,所有接口和电缆需要确保连接好,因为如有个别连接不良点,该点电位始终是0,造成错码而无法判断。
3、传输距离不能远,对于不同物理器件传输的距离不同,一般在10米内使用,对于复杂环境,希望有隔离。
4、对于位数较多,要许多芯电缆,并要确保连接优良,由此带来工程难度及可靠性隐患,同样,对于编码器,要同时有许多节点输出,尤其是高位或多圈编码器,器件集中在编码器内部,增加编码器器件的故障损坏率。
二.同步串行界面(SSI)输出
串行输出就是数据集中在一组电缆上传输,通过约定,在时间上有先后时序的数据输出,这种约定称为通讯规约。串行输出连接线少,传输距离远,对于编码器的保护和可靠性就大大提高了,一般高位数的绝对编码器和绝对值多圈编码器都是用串行输出的。串行输出分同步与异步界面,同步就是发送指令与数据是同步的,这样就是指令走一对电缆,数据走一对电缆,同步工作,常常用SSI来表示。SSI的物理格式一般是5VTTL的或5V差分的,也有用推挽式的,其数学格式各家自行约定,指令一般有三部分组成,1是同步节拍,2是指令-数据输出的内容,3是数据的起始,这些往往以通讯规约集合在一起了。
绝对值编码器在机械臂上的运用
随着工业自动化的不断发展,机械臂在各领域行业运用越来越广泛,接下来就让小编介绍下,绝对值编码器在工业智能机械臂上的应用。
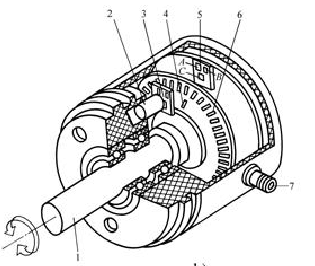
首先,让我们先了解一下绝对值编码器,绝对编码器光码盘上有许多道刻线,每道刻线依次以2线、4线、8线、16线……编排,这样,在编码器的每一个位置,通过读取每道刻线的通、暗,获得一组从2的零次方到2的n-1次方的2进制编码(格雷码),这就称为n位绝对编码器。这样的编码器是由码盘的机械位置决定的,它不受停电、干扰的影响。
绝对编码器由机械位置决定的每个位置的准有性,它无需记忆,无需找参考点,而且不用一直计数,什么时候需要知道位置,什么时候就去读取它的位置。这样,编码器无需开机找零,抗干扰特性、数据的可靠性大大提高了。另外,绝对值编码器无需判定方向、累计计数,可直接读数,其响应也较增量的快。
一般来说,每一维的机械手臂位置信息的反馈,都需要绝对值编码器提供反馈。高精度机械手臂的应用中,比如半导体自动化的机械手臂,较高可提供高达30位的多圈位置信息,为机械手臂的精确控制提供必要的反馈信息。能检测出每分钟12,000转的运动信息,反应非常灵敏;可以通过读取的位置信息,计算得到机械手臂的运动速度等参数。对于多维机械手臂的运动位置,绝对值编码器上电时可以由主控制器读取,这对于增量式的编码器有很大的优势。
对于机械手臂的设计要求高精度,高灵敏度,小尺寸,模块化设计,让绝对值编码器能更好的应用于其中。
在多圈光电绝对值编码器应用中,由于其位置信息不需要电池供电或其他的储存,在系统上电后便能方便的读取,这些优点是增量编码器所不能比拟的。绝对值编码器高精度,高灵敏度,快速反应,能很好的应用在闸门开度控制、机械手臂、高精度位置控制部件中。