当前的直流异步电机并没有针对低惯量和高加速度反应进行设计,是否使用伺服电机?
一台带有反馈设备的异步电动机可以为特殊应用提供更好的解决方案吗?看一看伺服电机和异步电机的定义和性能属性,也许可以得到答案。
伺服电机系统:伺服系统不仅仅是一台电机,它是包含控制器、驱动、电机和反馈设备的闭环运动系统,通常还带有光学或者磁性编码器。因为供应商总是在做伺服电机的广告,人们就发生了概念混淆。
“ 伺服电机”是具有永磁(PM)的同步机器,代表为有刷或者无刷永磁电机。它的性能属性和其他的几种电机类型不太一样。永磁同步电机拥有很高的峰值和连续扭矩,可以用来在精确定位系统中以很高的加速度和减速度驱动伺服系统。扭矩通常和输入电流成正比,电机轴速和输入电压直接相关。输入电压越高,电机的速度也就越快,扭矩/速度曲线是线性的。
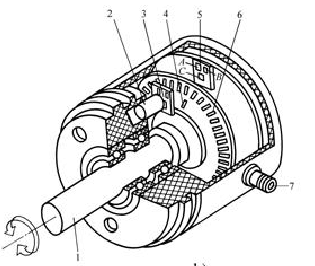
永磁结构和电机的气隙直接相连。看看永磁无刷电机的配置,可动的转子(具有永磁性)和固定的定子线圈在磁性上相互作用,使电机具备扭矩和速度。三相定子域交替加强,永磁转子与旋转的定子同步。一个特殊的电子沟通系统可以用来检测转子的位置以加强定子线圈。在精确定位系统中,除了大多数汽
车应用和系统中使用超大型电机之外,都要选择永磁无刷电机。当用在闭环扭矩、速度或者定位系统中,永磁无刷电机只是一种伺服电机。
异步电机拥有和永磁无刷电机相同的物理定子,但是转子结构完全不同。鼠笼异步电机包括一系列铝制或者铜制件,嵌入在转子结构的凹槽中,通过大型的短翼尾部连接。这些转子短板与定子旋转域磁性耦合,感生出新的转子域,同定子相互作用以使转子运动。在同步定子、慢速转子域和实际转子速度之间存在一点微小差距,这个速度差距导致了滑移。输入的频率决定了电机速度。
举例来说,一台60Hz的两极交流电机空载速度可以达到3600rpm,而四极交流电机的速度则低于1800rpm,并且依赖于滑移率。随着电机扭矩的增加,滑移增加而速度下降。交流异步电机要增加扭矩,代价是降低速度 ,直到负载达到临界点这时候电机速度突然降低到零。一个固有的交流电机性能特点是:它的初始扭矩很小,而且当电机启动时没有任何负载。
这个固有的扭矩-速度性能,随着八十年代电动变频器的出现而被彻底改变了。变频器的功能在于 ,使用可调或者可变的驱动重新确定扭矩-速度曲线,以改变电压和频率,从而使交流异步电动机成为系统速度之王。
当今的速度和定位系统:高性能驱动的持续进步 ,已经使交流异步电机和永磁无刷电机以及相应的驱动在市场上更具竞争力,但是永磁无刷电机仍然统治着定位控制应用。除此而外,永磁无刷电机还在工厂里蚕食着直流有刷速度控制在1kw(1.37hp)或者更低瓦数应用的市场。
怎样选择:直流异步电机当前不是为了低滞和高加速度响应所设计。它占据了从100瓦到100万瓦的速度应用的绝大部分市场份额。
除了在50kw(67hp)或者更大的系统之外,都可以将永磁无刷电机用于伺服定位系统。在固定或者可变速度的系统里,则更多的使用交流异步电机。通用的解决方案使很少见的。其他的电机也还不错 ,但是远远没有经典的交流异步电机和新兴的永磁无刷电机这样成功。
伺服电机的结构和性质
其实伺服电机严格来说是一个电机系统,单独的一台电机并不能称为伺服电机,电机与传感器、控制器共同组成的系统,是能够完成比较精准的位置、速度或力矩输出的,我们叫它伺服电机系统。下面我们分析了解伺服电机结构和性质。
伺服(servo)一词源自拉丁文“Servus”,本意为奴隶(slave),在这里意指依照命令执行动作。我们前文也有提到,伺服电机最大的特性是可对速度、位置、力矩等根据需要进行较精确控制。那么这种较精确控制又是怎么实现的呢?
那我们就来介绍一下伺服电机的三环控制,环即为负反馈调节系统。
最内环是直接在伺服驱动器内部进行的电流环,通过霍尔效应传感器检测驱动器给电机各相的驱动电流大小,进行PID调节。电流环多用于控制电机转矩,在转矩模式下响应最快。
中间环是速度环,通过检测电机编码器的信号输出来控制电机。
最外环是位置环,可根据实际情况来选择是在驱动器和电机编码器之间还是在外部控制器和电机编码器或最终负载之间构建。
而之所以成为三环控制,是因为它们之间相互联结。电流环会根据速度环的指令快速而准确控制电机。速度环则会根据位置环的指令速度快速而准确控制电机,使得其不受负载影响,并快速跟踪指令速度的变化。位置环则是比较检测信号与给定值,输出速度环的指令速度,使执行件位置与指令位置一致。伺服电机的结构和性质。