交流伺服电机相比其他电机有什么优势?交流伺服驱动器原理介绍!
1、精度:实现了位置,速度和力矩的闭环控制;克服了步进电机失步的问题。
2、转速:高速性能好,一般额定转速能达到2000~3000转。
3、适应性:抗过载能力强,能承受三倍于额定转矩的负载,对有瞬间负载波动和要求快速起动的场合特别适用。
4、稳定:低速运行平稳,低速运行时不会产生类似于步进电机的步进运行现象。适用于有高速响应要求的场合。
5、及时性:电机加减速的动态相应时间短,一般在几十毫秒之内。
6、舒适性:发热和噪音明显降低。
交流伺服驱动器原理及原理图
交流伺服驱动器原理
伺服电机内部的转子是永磁铁,驱动器控制的U/V/W 三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。
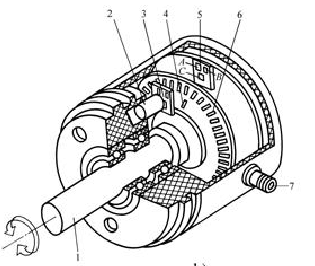
交流伺服电动机定子的构造基本上与电容分相式单相异步电动机相似,如图1 所示。其定子上装有两个位置互差90°的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf 上;另一个是控制绕组L,联接控制信号电压Uc。所以交流伺服驱动器又称两个伺服电动机。
交流伺服电动机的转子通常做成鼠笼式,但为了使伺服电动机具有较宽的调速范围、线性的机械特性,无“自转”现象和快速响应的性能,它与普通电动机相比,应具有转子电阻大和转动惯量小这两个特点。目前应用较多的转子结构有两种形式:一种是采用高电阻率的导电材料做成的高电阻率导条的鼠笼转子,为了减小转子的转动惯量,转子做得细长;另一种是采用铝合金制成的空心杯形转子,杯壁很薄,仅0.2-0.3mm,为了减小磁路的磁阻,要在空心杯形转子内放置固定的内定子,如图2 所示。空心杯形转子的转动惯量很小,反应迅速,而且运转平稳,因此被广泛采用。
交流伺服驱动器在没有控制电压时,定子内只有励磁绕组产生的脉动磁场,转子静止不动。当有控制电压时,定子内便产生一个旋转磁场,转子沿旋转磁场的方向旋转,在负载恒定的情况下,电动机的转速随控制电压的大小而变化,当控制电压的相位相反时,伺服电机将反转。