伺服电机与步进电机的应用有什么不同之处?伺服电机的发展趋势!
伺服电机的定义
伺服电机的伺服(servo)指的即是控制机构。在科技领域里,控制的一侧称为主(master),被控制的一侧称为从(slave),据说伺服和从都源自拉丁语的Servus(奴隶)。
也就是说,伺服电机这个名称的意思就是"按照指示忠实工作"的电机,只要能够控制旋转位置和转速等,无论什么机制的电机都被称为"伺服电机"。

因此,有时也会将步进电机和无铁芯电机包括在伺服电机里,在此,我们对装配了编码器(旋转检测器),并根据该信息使用驱动器控制速度和位置(角度)的伺服电机类型进行说明。
伺服电机与步进电机的区别
步进电机与伺服电机一样,配备了通过接受外部信号控制旋转角度的机构,它们都可以执行设备类的定位等操作,但是具有下列区别。
1.控制方式
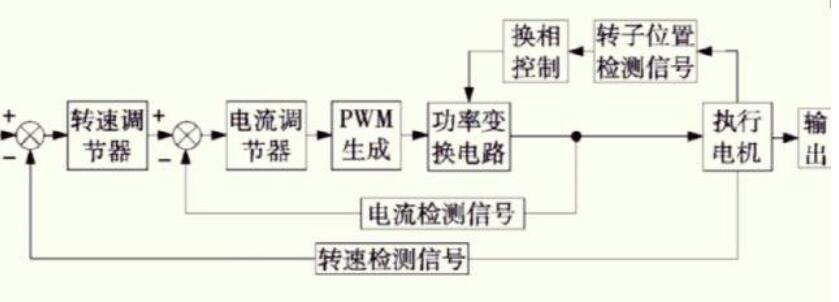
伺服电机通过编码器(旋转检测器)检测出旋转位置,并将编码器检测到的信息反馈给控制器来控制位置。因此能够实现高精度停止,即使是在旋转过程中停止,如果位置有偏差也能返回原来的位置。另一方面,步进电机的旋转角度与脉冲数成正比,驱动器通过从控制器接收这个脉冲信号来控制位置。因此,其实它并不需要检测位置的机构,也就无法识别位置的偏差。所以可能会因意外的负载波动等原因而发生失步(指示的旋转角度与电机旋转不同步的状态)。
①伺服电机
程序→控制器(脉冲信号)→驱动器(电流转换)→电机→编码器(编码器信号)→驱动器(动作信息)→控制器
②步进电机程序→控制器(脉冲信号)→驱动器(电流转换)→电机
2.扭矩/转速
伺服电机在低速区域和高速区域均能产生稳定扭矩,因此可以实现高速运行。步进电机只是在低速区域能够产生较高的扭矩,在高速区域扭矩减小,因此不适合高速旋转的用途。
3.成本
伺服电机因为需要使用昂贵的旋转编码器和伺服控制装置(伺服驱动器),成本比步进电机更高。
4.加速性能
步进电机从静止加速到工作转速(一般为每分钟几百转)需要200~400毫秒。交流伺服系统的加速性能较好,从静止加速到其额定转速3000RPM仅需几毫秒,可用于要求快速启停的控制场合。
伺服电机的历史
伺服电机技术随着工业机器人的进步而有显著发展。
美国从20世纪50年代起重视工厂的自动化,并开始了以皮带输送机、自动化装置、工业机器人等为代表的自动化进程。初期的自动化装置和工业机器人的执行器使用液压和气压定位,存在精度、使用的稳定性、管线、漏油漏气等课题。
之后,随着20世纪50〜60年代DC伺服电机技术不断发展,实用性不断提高,它开始用于工业机器人,以替代存在问题的液压和气压机构。
到了20世纪80年代,出现了AC伺服电机,机器人有了追求更小更轻的趋势等,AC伺服电机因其较高的实用性,现如今几乎应用在所有工业领域的设备类产品上。
伺服电机的类型
伺服电机可以分为DC伺服电机和AC伺服电机两类。
DC伺服电机
由带刷DC(直流)电机驱动的伺服电机。DC电机比AC电机容易控制,且体积小、价格低,因此以前广泛使用,但是随着AC电机控制技术的发展,现在使用的机会越来越少了。
AC伺服电机
由AC(交流)电机驱动的伺服电机。其控制比DC电机复杂,但是随着控制技术的发展,现在已经是使用最普遍的伺服电机了。
AC伺服电机按照驱动电机的类型可以分为同步(SM)型和感应(IM)型两类。两者的区别在于是否使用永磁体。
同步(SM)型使用永磁体。电机输出功率越大,昂贵永磁体的使用量也越多,所以成本较高。因此,多用于输出功率较小的领域(不足10kW),现如今随着高性能永磁体的出现,同步型也就成了主流产品。
感应(IM)型不使用永磁体,用于输出功率较大的领域(10kW以上)。
伺服电机未来的发展趋势
伺服电机作为重要的工业自动化设备零部件,它的发展一直备受关注,毕竟伺服的发展也会推动工业自动化行业的进步。所以,很多伺服电机厂家也在不断的创新研发,力求生产出符合行业发展要求的电机。那么,将来伺服电机会朝着那几个方向发展呢,我们来分析一下。
(1)智能化
现在大部分伺服驱动器都具备参数记忆,分析功能和故障自诊断的功能,未来的伺服随着科技的进步和研发,智能化的趋势会更加明显。
(2)高精度,高性能
采用更高精度的编码器,更高的采样精度和数据位数。
(3)通用化
新型的伺服驱动器,可以适用于不同的场合,并且驱动不同类型的电机。也可以适应不同的传感器。
(4)小型化
体积和重要越来越小这会是一个必然的趋势,为了适应机械设备的安装和使用,体积和重量会不断变小,安装和使用都非常便捷。
这就是伺服电机系统未来和现在会改变的趋势,期待伺服会有更多的进步,促进工业自动化行业不断发展。