进口伺服电机有哪些调试步骤?伺服系统的几种运动控制方式介绍!
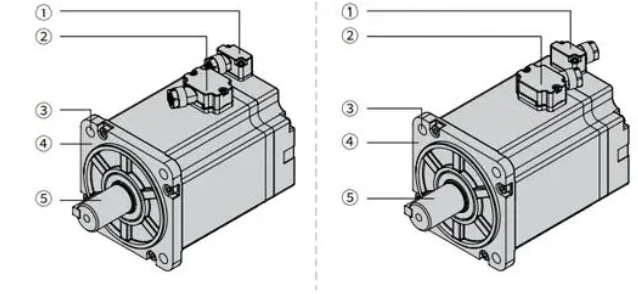
伺服电机具有自整定功能,可对刚性低的装置进行自动适当调整,满足绝大部分应用场合;关键零件设计寿命长达10年间,保障设备顺畅运行;产品型号从最小50W到最大3000W,满足各种需求;

下面几点是伺服电机 调试步骤:
初始化参数:在接线之前,先初始化参数。在控制卡上:选好控制方式,将PID参数清零,让控制卡上电时默认使能信号关闭,将此状态保存,确保控制卡再次上电时即为此状态;在伺服电机上:设置控制方式,设置使能由外部控制,编码器信号输出的齿轮比,设置控制信号与电机转速的比列关系,一般来说,建议使用伺服工作中的最大设计转速对应9V的控制电压。
接线:将控制卡断电,连接控制卡与伺服之间的信号线。以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服电机 输出的编码器信号线。复查接线没有错误后,伺服电机和控制卡上电,此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线,用外力转动电机,检查控制卡是否可以正确检查到电机位置的变化,否则检查编码器信号的接线和设置。
试方向:对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的,通过控制卡打开方伺服电机使能信号,这个伺服应该以一个较低的速度转动,这就是传说中的零漂,一般控制卡上都会有抑制零漂的指令和参数,使用这个指令或参数,看伺服电机的转速和方向是否可以通过这个指令(参数)控制,如果不能控制,检查模拟量接线及控制方式的参数设置;确认给正数,伺服电机正转,编码器计数增加,给出负数,电机反转转,编码器计数减小,如果电机带负载,行程有限,不要采用这种方式,测试不要给过大的电压,建议在1V以下,如果方向不一致,可以修改控制卡或伺服电机上的参数,使其一致。
抑制零漂:在闭环伺服控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住,使用控制卡或伺服上的抑制零漂的参数,仔细调整,使用电机的转速近与零。由于零漂本身也有一定的随机性,所以不必要求伺服电机转速绝对为零。
建立闭环伺服控制:再次通过控制卡将伺服电机使能信号放开,在控制卡上输入一个较小的比例增益,至于多大算较小,这只能凭感觉了,如果实在不放心,就输入控制卡能允许的最小值,将控制卡和伺服电机的使能信号打开,这时,电话应该已经能够按照运动指令大致做出动作了。
调整闭环参数:细调控制参数,确保伺服电机 按照控制卡指令运动,这就是必须要做的工作,而这部分工作,更多的是经验,这样只能从略了。
伺服系统几种运动控制
伺服系统运动控制发展迅速,减少劳动力与劳动成本,提高了工业效率,是工业自动化行业福星!
气动和液压伺服控制
尽管气动和液压伺服在当今的自动化运控市场并不十分常见,但在很多行业应用场合中它们还是具备极强的不可替代性。因此有必要在这里先简单提一提。
气动和液压伺服都是以流体压力作为动力驱动和控制负载运行的,因此二者在产品形态和系统架构上有着不少相似之处。
首先,能够为气动或液压系统提供流体压缩动力的,自然就是泵站,也就是空压机和液压站。它们通过内部的电机驱动叶轮旋转,压缩流体管路的气体或液压油,然后借助特定的压力调节装置,在系统回路(气路或油路)中产生稳定的流体压缩动力。
但此时管路中的压缩动力是不能直接用来控制负载运动的,原因在于其输出的方向和大小并未根据应用需求进行过调节和控制,这就需要在流体回路中使用各种阀。例如:用节流阀可以手动实现最基本的速度调节;通过带有控制输入的比例方向阀或比例压力阀,能够对输出速度或压力进行动态调节;而如果要做到比较精准的位置控制,就需要用到伺服比例阀,并结合特定的位置反馈装置。
如果说各类阀的作用是将泵站的输出经调节转换成应用所需的可变流体动力,那么气缸或液压缸就是基于这些流体压缩动力最终驱动和控制负载运动的执行机构。无论是气缸还是液压缸,其原理都是通过流体压缩后产生的压力驱动其内部推杆产生活塞式运动,因此这些缸的输出都是在有限行程范围内的往复直线运动,并能够在其末端产生一定的推力或拉力。
上面说的这些其实都仅仅是气动和液压技术在动力传动环节的产品,而要能够将其称之为伺服并用于实现精准的运动控制,反馈装置则是必不可少的。在气动和液压伺服系统中,通常会使用专门的气缸或油缸位置传感器(例如:缸体内置的霍尔元件等),而设备控制系统则会基于传感器的反馈与设定的应用参数,通过对各类阀的开闭动作进行实时调节,调整缸体内流体的压力和方向,以最终实现对负载运行姿态的控制。
变频伺服控制
必须承认,由于技术日趋成熟,以及总体成本和技术门槛不断降低,变频伺服已经在大量应用中取代了包括上述气动和液压在内的其他类型的伺服技术,逐渐成为工业运控领域的绝对主力。
变频伺服,顾名思义,它是以可变频交流电为动力的伺服技术。而我们知道,以我们目前掌握的电力驱动技术来说,这种可变频率的交流电基本上必须通过直流电逆变生成的,因此,变频伺服系统所使用的动力通常是来自稳定的直流电源,可以是电池组,也可以是能够将交流电转换为直流电的整流装置。
有了稳定的直流电源,要产生可变频率的交流电输出,就需要使用变频驱动器(俗称“伺服驱动器”)作为中间的动力转换装置。在伺服系统中使用的变频伺服驱动器与一般的工业变频器在工作原理上并没有太大的差别,不过由于其所面对的设备应用在运行精度和动态性能方面有着更为严苛的要求,因此往往会表现出更加激进的控制特性(如:较高的频响带宽),与此同时,集成运控反馈端口也就成为了伺服驱动器的标配。
在变频伺服系统中,将可变频交流电转换为机械动力的传动执行部件通常是各类电机,这个也是和一般的变频传动技术类似的。但为了能够在更宽的速度范围内(尤其是低速)获得优质的动态响应特性,变频伺服通常会使用集成运动反馈的永磁同步电机。
此外,为了能够简化设备系统的传动环节、提升综合传动效率和控制性能,除了有普通旋转电机以外,变频伺服的传动执行部件还经常会有一些不同类型的动力输出形式,如:旋转直接驱动电机、直线电机、直线电动缸等等。
在将旋转伺服电机的输出动力传递到最终运动负载的过程中,运控系统系统往往还需要使用到各种伺服级别的机械传动组件,如:联轴器、减速机、同步带、丝杠等等,这一点也是有必要提醒大家注意的。 同样,变频伺服控制也需要使用反馈装置,也就是编码器,这是所有伺服运控系统都必备的。如果是旋转伺服电机,一般就是其轴末端的反馈编码器;若是直线电机,则是直线编码器和光栅尺;有时,伺服系统还可能会在某个负载工位上使用不止一个编码器反馈,以减少因中间传动环节引起的测量误差,从而进一步提升系统反馈精度。
当然,在使用伺服传动技术时,除了上面提到的这些高性能驱动和反馈装置,往往还需要有包括:控制器、输入输出 I/O 模组、传感器、软件、网络、安全、连接器、线缆等在内的各类产品和技术组件。不难看出,这几乎已经是一套完整的设备控制系统了。
另外,随着工业设备的智能化程度越来越高,其机电系统也正在变得越来越庞大、复杂,各类部件之间各种功能和结构上的集成与融合也就是很自然的发展趋势,于是我们看到了市面上不断涌现出来的各式各样的机电一体化产品,如:集成驱动电机、电驱传输轨道、集成减速机电机等等。