总线型伺服VS脉冲型伺服有哪些优势?伺服电机的位置控制分析!
一、伺服是什么?
1.什么是伺服?为什么要用伺服?
伺服系统定义:实现输出变量精确地跟随或复现输入变量的控制系统。对运动控制的要求越来越高,伺服控制应运而生。
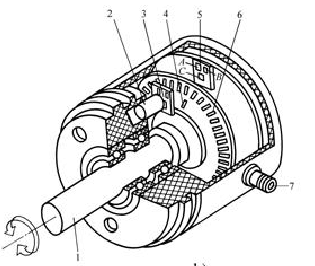
2.什么是伺服电机?它有什么特点?
伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
二、如何实现伺服控制?
伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。
伺服驱动系统中,脉冲的方式一般是一些简单伺服应用,要求不高的场合。众所周知,发送和接收脉冲都是有一定延时的,而总线的控制方式的总线型伺服驱动器(即绝对值伺服或EtherCAT伺服)才能真正意义上实现等时同步,因为总线通讯的速度更快,可以直接发送速度或位置设定值。所以高端的伺服应用都是走的总线控制方式。
三、总线型伺服VS脉冲型伺服
总线型伺服驱动器具有很强的灵活性和很高性价比,与脉冲型伺服对比的优势如下:
1、节约布线成本,减少布线时间,减小出错机率。控制器的一个总线通讯口可以连接多台伺服,伺服之间用简单的RJ45口插接即可,缩短施工周期。
2、信息量更大:全数字信息交互,可以双向传输很多参数、指令和状态等数据;脉冲方式只能单向传送位置或速度信息,无法获取伺服的更多状态或参数。
3、精度高,数字式通讯方式:无信号漂移问题,指令和反馈数据精度可达32bit。
4、可靠性更高,抗干扰能力更强,不会出现丢脉冲现象。脉冲/方向控制在高速脉冲时,会不可靠。
5、降低系统总成本,当超过两台以上伺服时,不用调整控制器配置,而脉冲型伺服需要增加脉冲或轴控模块,伺服台数较多时甚至需要改用更高等级的控制器硬件才能满足要求。
6、可开发软件功能更强大的设备,而无需额外硬件或接线:控制器能够实时通过总线监视伺服电机出现的故障,并在示教器上显示出来。同时控制器还可以监视伺服电机实际位置、实际速度等信息,也可以根据需要由程序自动调整伺服参数。可实现在示教器中设定伺服参数,而不用到伺服面板修改,简捷直观不易出错。
7、采用标准的运动功能块库,提高编程调试效率:采用总线系解决统方案,避免了传统脉冲方向控制方式的编程量大、调试复杂等问题,提高了效率,节省了成本和时间。
8、可以实现远距离控制,在生产线设备很长,或伺服数量较多时十分方便、安装成本低。
9、可维护性更强,有更多的状态信息和诊断信息。数控和运动控制采用总线控制目前在欧美非常流行。
四、总线型伺服的优点汇总
1、接线简化。传统控制器,每轴接线约13~16根,若有反馈,需增加6~8条;而用总线只需要2根电缆。
2、良好EMI/EMC传统接线方式,每个单元传输信号都有接地点问题,因工业使用环境恶劣,会造成接地点漂移,容易受到干扰。
3、灵活简单的控制模式。
4、高同步实时,高可靠冗余。
5、高隔离静电阻抗器保护。
6、共模误差小。
7、通过总线实时读取参数和诊断数据,使设备调试维护更加简单。
伺服电机的位置控制分析:
在回答这个问题之前,首先要清楚伺服电机的用途,相对于普通的电机来说,伺服电机主要用于精确定位,因此大家通常所说的控制伺服,其实就是对伺服电机的位置控制。其实,伺服电机还用另外两种工作模式,那就是速度控制和转矩控制,不过应用比较少而已。
速度控制一般都是有变频器实现,用伺服电机做速度控制,一般是用于快速加减速或是速度精准控制的场合,因为相对于变频器,伺服电机可以在几毫米内达到几千转,由于伺服都是闭环的,速度非常稳定。转矩控制主要是控制伺服电机的输出转矩,同样是因为伺服电机的响应快。应用以上两种控制,可以把伺服驱动器当成变频器,一般都是用模拟量控制。
伺服电机最主要的应用还是定位控制,位置控制有两个物理量需要控制,那就是速度和位置,确切的说,就是控制伺服电机以多快的速度到达什么地方,并准确的停下。
伺服驱动器通过接收的脉冲频率和数量来控制伺服电机运行的距离和速度。比如,我们约定伺服电机每10000个脉冲转一圈。如果PLC在一分钟内发送10000个脉冲,那么伺服电机就以1r/min的速度走完一圈,如果在一秒钟内发送10000个脉冲,那么伺服电机就以60r/min的速度走完一圈。
所以,PLC是通过控制发送的脉冲来控制伺服电机的,用物理方式发送脉冲,也就是使用PLC的晶体管输出是最常用的方式,一般是低端PLC采用这种方式。而中高端PLC是通过通讯的方式把脉冲的个数和频率传递给伺服驱动器,比如Profibus-DPCANopen,MECHATROLINK-II,EtherCAT等等。这两种方式只是实现的渠道不一样,实质是一样的,对我们编程来说,也是一样的。这也就是我想跟大家说的,要学习原理,触类旁通,而不是为了学习而学习。
对于程序编写,这个差别很大,日系PLC是采用指令的方式,而欧系PLC是采用功能块的形式。但实质是一样的,比如要控制伺服走一个绝对定位,我们就需要控制PLC的输出通道,脉冲数,脉冲频率,加减速时间,以及需要知道伺服驱动器什么时候定位完成,是否碰到限位等等。无论哪种PLC,无非就是对这几个物理量的控制和运动参数的读取,只是不同PLC实现方法不一样。