直流伺服系统的有哪些组成部分及控制原理?直流伺服驱动器的特点介绍!
直流伺服和交流伺服相似,可以采用控制器开环控制方式,控制器半闭环控制和全闭环控制系统。
直流伺服系统控制面板结构如下,面板右侧为与直流伺服电机接口板的接口,包括电机驱动接口和编码器接口;左侧为与运动控制器面板的接口,包括位置控制模式接口和速度控制模式接口。

M+,M-信号为直流无刷伺服电机的电源线,用于驱动电机的运动。
A+,A-,B+,B-,C+,C-,5+,0V信号为编码器信号,用于反馈电机轴的实际位置。
A,/A,B,/B,C,/C,+5V,PUL+,DIR+,OGND,OVCC,GND,DAC,RESET,ALM,ENABLE为与控制器相连的控制信号。
其含义为:
A,/A,B,/B,C,/C为驱动器反馈给运动器控制器的编码器信号。
+5V为电源。
PUL+,PUL-为脉冲信号,用于位置模式下的电机控制。
DIR+,DIR-为方向信号,用于位置模式下的电机控制。
OGND,OVCC,GND分别为模拟地,模拟电源和数字地。
DAC为驱动器接受的模拟控制信号,范围一般为-10V-10V。
RESET,ALM,ENABLE为控制信号,分别表示驱动器的复位,报警以及使能功能。
直流伺服驱动器通常具有速度控制模式和位置控制模式。
采用位置模式时,输入控制信号为脉冲和方向(或是正负脉冲),采用速度模式时,输入控制信号为模拟量。驱动器将输入信号转化为速度控制信号,经过速度控制器转化为电流控制信号,电流信号通过PWM回路作用于功率扩大模块的输出模块,最后施加给电机。
直流伺服驱动器采用IDM只能伺服驱动器。
IDM240/640是嵌入式智能、高精密、全数字化的伺服驱动器,可驱动方波或正弦波无刷伺服电机(PMSM),直流有伺服电机,通过CAN或RS-485接口可组成多达256个轴的分布式智能网络运动系统,嵌入的高级可编程运动语言(TML)提供各种高级运动控制和plc专用功能。
主要特点如下:
分布式智能,单轴主控运行或从动轴模式
控制模式:位置,速度,转矩,电压,外部变量
运动模式:脉冲+方向,电子齿轮,Profiling,Contouring
可编程保护:位置误差,过流,过压或欠压,I2t,
DSP控制技术:基于MotionChipTM技术
RS232/485串行接口,波特率可达115KB
CAN2.0局域总线,兼容CANopen,波特率可达1MHz
输出电流:连续电流5A/8A,峰值电流16A,
电源电压:12-48VDC(IDM240),12-48VDC(逻辑电源)/80V(电机)(IDM640)
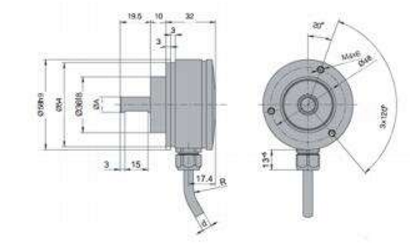
紧凑结构设计:136x84.5x26mm
控制软件采用EasyMotionStudio,控制软件特点如下:
高级图形化评估分析编程工具EasyMotionStudio平台快速设置电机、驱动器参数及编程运动程序,TML_LIB函数库是智能化伺服驱动器在PC上执行运动控制应用的一个函数库,在C/C++、Basic、Delphi、Labview开发的应用程序中调用库中的.DLL文件执行后,能直接与驱动器通信、设置参数、查询状态、传送命令、定义运动事件,测试输入输出口状态等。
StarterKitforIDM640:包含驱动器的完整组件,包括一个IDM640驱动器,一个电机,一个I/O板,EasyMotionStudio软件,以及应用程序的帮助和完整文件。是测试您的运动控制程序的理想实验平台。如上所述均包含在一个可立即运行、即插即用的组件中。
直流伺服电机包括如下组成部分:
定子:磁场—永磁体
转子:电枢绕组
换向:换向器与碳刷
加于直流电机的直流电源,借助于换向器和电刷的作用,使直流电机电枢线圈流过的电流,方向是交变的,从而使电枢产生的电磁转矩的方向恒定不变,确保直流电动朝确定的方向连续旋转。
直流伺服优点:
•精确的速度控制
•转矩速度特性很硬
•原理简单、使用方便
•价格优势
缺点:
•电刷换向
•速度限制
•附加阻力
•产生磨损微粒(对于无尘室)