直流和交流伺服驱动器工作原理一样吗?伺服驱动器使用注意事项!
直流伺服驱动器和交流伺服驱动器工作原理一样吗?那天突然有个客户问了我这个问题。简单地说:伺服驱动器是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精度的定位系统。一般是通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位,目前是传动技术的高端产品。对于这个,我们需要从伺服驱动器的工作原理及控制方式深入探讨。
伺服驱动器工作原理:主要是根据伺服控制器送的指令(P,V,T)工作。同步电机并非完全同步于旋转磁场,驱动器必须进行修正工作,使电机工作稳定不失步。所以驱动电机正确跟随控制指令工作是伺服驱动器的主要工作任务。以下采用通用伺服电机系统P command (位置伺服)为例,说明伺服驱动器的基本原理及各项必要的参数。因为位置伺服驱动器具备完整的驱动器元件。

位置伺服驱动器内部包含:位置控制单元、速度控制单元和驱动单元。驱动器与伺服马达之间为闭环控制系统,
驱动器由编码器送回数据进行控制修正工作各厂家伺服电机驱动器的软硬件设计均有差异,如编码器为通称,也有使用角传感器的,但基本控制结构及原理是相同的。指令脉冲经过伺服驱动器内电子齿轮增减频率。
一般伺服驱动器都有三种控制方式:位置控制方式、转矩控制方式、速度控制方式。
1、位置控制:位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值,由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。
准确的说是伺服驱动器对电机的转速、转角和转矩均于控制,上位机对驱动器发脉冲串进行转速与转角的控制,输入的脉冲频率控制电机的转速,输入的脉冲个数控制电机旋转的角度。
2、转矩控制:转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,可以通过即时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现。
详细的说是伺服驱动器仅对电机的转矩进行控制,电机输出的转矩不在随负载变,只听从于输入的转矩命令,上位机对驱动器发出的是模拟量(电压)信号,范围为+10V~-10V,正电压控制电机正转,负电压控制电机反转,电压值的大小决定电机输出的转矩。电机的转速与转角由上位机控制。
3、速度模式:通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环PID控制时速度模式也可以进行定位,但必须把电机的位置信号或直接负载的位置信号给上位反馈以做运算用。位置模式也支持直接负载外环检测位置信号,此时的电机轴端的编码器只检测电机转速,位置信号就由直接的最终负载端的检测装置来提供了,这样的优点在于可以减少中间传动过程中的误差,增加了整个系统的定位精度。
伺服驱动器均采用数字信号处理器(DSP)作为控制核心,可以实现比较复杂的控制算法,实现数字化、网络化和智能化;功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入了软启动电路,以减小启动过程对驱动器的冲击。 在用伺服驱动器(无论是直流还是交流伺服驱动器)的时候需要注意以上三个问题:
如果对电机的速度、位置都没有要求,只要输出一个恒转矩,当然是用转矩模式。
如果对位置和速度有一定的精度要求,而对实时转矩不是很关心,用转矩模式不太方便,用速度或位置模式比较好。
如果上位控制器有比较好的闭环控制功能,用速度控制效果会好一点,如果本身要求不是很高,或者基本没有实时性的要求,采用位置控制方式。
伺服驱动器使用时的常见问题及注意事项
伺服驱动器是用来控制伺服电机的一种控制器,属于伺服系统的一部分,主要应用于高精度的定位系统,一般是通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位,是现代运动控制的重要组成部分,被广泛应用于工业机器人及数控加工中心等自动化设备中。
伺服系统包括伺服驱动器和伺服电机,驱动器利用精密的反馈结合高速数字信号处理器DSP,控制IGBT产生精确电流输出,用来驱动三相永磁同步交流伺服电机达到精确调速和定位等功能,设备接地不良可能会造成触电、火灾或设备损坏。
伺服驱动器接地的八大注意事项
一、正确的屏蔽接地处,是在其电路内部的参考电位点上,这个点取决于噪声源和接收是否同时接地,或者浮空。
二、要确保屏蔽层在同一个点接地使得地电流不会流过屏蔽层。
三、避免多种连接大地方式产生的地回路很容易受噪音影响而在不同的参考点上产生电流。
四、在交流电源与驱动器直流总线之间没有隔离的情况下,不能将直流总线的非隔离端口或非隔离信号接在地面上,会导致设备损坏及人员伤害等情况。
五、避免伺服驱动器接到外部电源的地,将直接影响到控制器和驱动器的工作。
六、交流的公共电压并不是对大地的,在直流总线和大地之间可能会有很高的电压,禁止直接接地。
七、在伺服系统中,公共地与大地在信号端必须要连接在一起。
八、为了保持命令参考电压的恒定,要将伺服驱动器的信号地接到控制器的信号地。
在许多场合,因为伺服驱动器的电流电压较高,比如有的伺服驱动器最大输出电流8A,电压325V,再加上其外壳未采用铝合金外壳进行磁屏蔽,因此对高灵敏的接收机系统造成干扰,使其无法工作,并且干扰电源,尤其在高频时,可能造成控制系统的单片机和上位机无法进行正常通讯,给正常使用造成了困难,因此干扰问题必须加以解决。
解决伺服驱动器干扰问题的方法
一、加装电源滤波器,减少对交流电源的污染。
二、一点接地原则。将电源滤波器的地、驱动器PE(地)(伺服驱动器与机箱底板绝缘)、控制
脉冲PULSE-和方向脉冲DIR-短接后的引出线、电机接地线、驱动器与电机之间电缆防护套、驱动器屏蔽线均接到
机箱壁上的接地柱上,并要求接触良好。
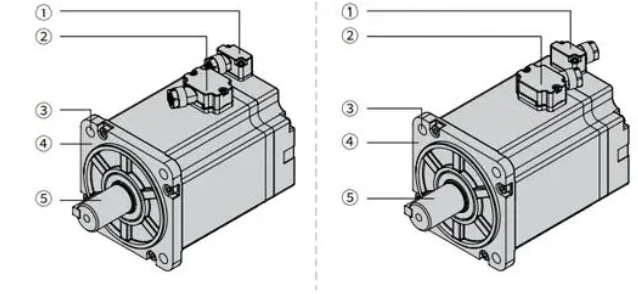
三、尽量加大控制线与电源线、电机驱动线之间的距离,避免交叉。比如我们在处理双轴驱动系
统中两个处在同一机箱的伺服驱动器安装位置时,一个驱动器铭牌朝前,另一个则朝后,并在结构布置上使这些
引线尽量短。
四、使用屏蔽线减轻外界对自己的干扰,或自己(电源线)对外界的干扰。
由于运动控制系统最终用户的工作条件和企业一线工程技术支撑能力的限制,常常使得机电系统不
能够得到良好的设备管理,轻则缩短机电一体化设备的生命周期,重则由于设备故障降低产能造成经济效益的损失。
伺服驱动器设备保养指南
一、为了延长伺服系统的工作寿命,在使用过程中需注意以下问题。对于系统的使用环境,需考虑到温度、湿度、粉尘、振动及输入电压这五个要素。定期清理数控装置的散热通风系统。应经常检查数控装置上各冷却风扇工作是否正常。应视车间环境状况,每半年或一个季度检查清扫一次。
二、由于环境温度过高,造成数控装置内温度超过55 60℃时,应及时加装空调装置。除了进行检修外,应尽量少开电气柜门。因为车间内空气中飘浮的灰尘和金属粉未落在印刷电路板和电气接插件上,容易造成元件间绝缘电阻下降,从而出现故障甚至使元件损坏。
三、当数控机床长期闲置不用时,也应定期对数控系统进行维护保养。首先,应经常给数控系统通电,在机床锁住不动的情况下,让其空载运行。在空气湿度较大的梅雨季节应该天天通电,利用电器元件本身发热驱走数控柜内的潮气,以保证电子部件的性能稳定可靠。