传感器—将要测量的物理量转换成可读取、处理的另一个物理量,现代控制中最常用的就是电信号。 如果把计算机、可编程控制器比喻为自动化控制的“大脑”,那么传感器就是自动化控制的“眼睛”,是机电一体化的信息反馈装置.由计算机、执行机构、执行机构内部反馈构成的控制系统,称为开环控制;由计算机、执行机构、执行机构内部反馈、执行效果外部传感器信息反馈构成的控制系统,称为闭环控制。传感器的电信号有模拟量型和数字量型,模拟量就是电流或电压的大小变化模拟被测量物理量的大小,如果传感器输出的模拟量电信号已经是标准的信号,例如4—20mA、0—20mA、1—5V、0—10V等,这样的传感器有时也称为变送器。传感器的电信号有时也用电压、电流高于某个域置或低于某个域置来代表1或0的数字信息,或用光信号的通、暗来传递信息,这样的传感器就是数字量输出型。
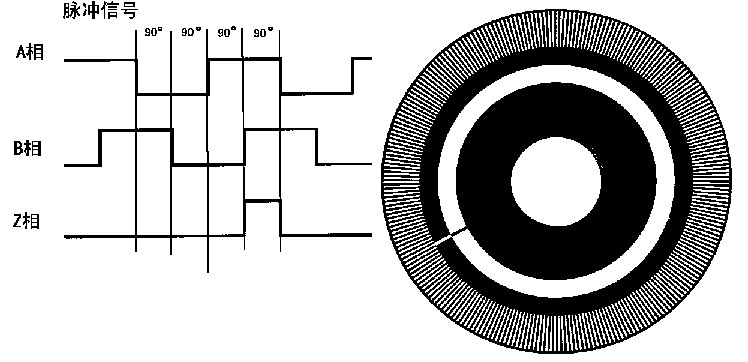
编码器—角位移,线位移及转速传感器.编码器是以数字化信息将角度、长度的信息以编码的方式输出的传感器,其具有高精度,大量程测量,反应快,数字化输出特点;体积小,重量轻,机构紧凑,安装方便,维护简单,工作可靠。编码器以测量方式来分,有直线型编码器,角度编码器,旋转编码器。如以信号原理来分,有增量型编码器,绝对型编码器。增 量 型 编 码 器 (旋转型)工作原理: 由一个中心有轴的光电码盘,其上有环形通、暗的刻线,有光电发射和接收器件读取,获得四组正弦波信号组合成A、B、C、D,每个正弦波相差90度相位差(相对于一个周波为360度),将C、D信号反向,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以代表零位参考位。
由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可获得编码器的零位参考位。
编码器码盘的材料有玻璃、金属、塑料,玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高,金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性就要比玻璃的差一个数量级,塑料码盘是经济型的,其成本低,但精度、热稳定性、寿命均要差一些。
分辨率—编码器以每旋转360度提供多少的通或暗刻线称为分辨率,也称解析分度、或直接称多少线,一般在每转分度5~10000线。
编码器机械外型—编码器以转轴类型分,有轴型和轴套型;以外形特征和安装法兰分,有同步法兰,夹紧法兰,紧凑型;轴套型又有半空型、全空型、大轴径型。
编码器轴径—编码器轴径有6毫米*、8毫米、10毫米*、12毫米,轴套型的有8毫米、10毫米、12*毫米、大口径20—50*毫米,带*号的是常规规格。
机械转速和电气转速编码器的机械转速以每分钟最大可以旋转多少圈表示—rpm;编码器的电气转速也称为开关频率,是读取每个脉冲信号的反应速度,以每秒多少次表示--Hz最大工作速度应同时兼顾编码器的机械转速、电气转速以及编码器后续接收设备的开关频率。Nmax=Fmax×60/Z ; N—min-1 ;F—Hz编码器的工作温度和防护等级编码器的最高最低工作温度代表了编码器内部机械和电子零件的水平,较好的编码器工作温度从-40到100℃,事实上低温情况下,受限制的是内部电子零件和外部的电缆以及密封特性。
防护等级是指编码器的防尘、防水性能,以国际标准IP的两位数表示,第一位0—6代表防尘,第二位0—7代表防水,IP54是最低的有限制条件的防尘防水标准,IP67可防水浸。并非在室内恒温条件下工作就不需要防水,因为编码器在工作和停机两种情况下,内部空气会热胀冷缩,密封不好,在停机是会有压缩性水气进入。专业的编码器的防护等级分电气外壳部分和转轴部分,有不同。转轴部分由于编码器的旋转要求,往往要略低。
工作电压、耗电流—工作电压一般有10—30Vdc和5Vdc±10%两种,电压和耗电流决定供电电源的功率。信号输出:信号输出有正弦波(电流或电压),方波(TTL、HTL),集电极开路(PNP、NPN),推拉式多种形式,其中TTL为长线差分驱动(对称A,A-;B,B-;Z,Z-),HTL也称推拉式、推挽式输出,编码器的信号接收设备接口应与编码器对应。
信号连接—编码器的脉冲信号一般连接计数器、PLC、计算机,PLC和计算机连接的模块有低速模块与高速模块之分,开关频率有低有高。
如单相联接,用于单方向计数,单方向测速。A、 B两相联接,用于正反向计数、判断正反向和测速。A、B、Z三相联接,用于带参考位修正的位置测量。A、A-,B、B-,Z、Z-连接,由于带有对称负信号的连接,电流对于电缆贡献的电磁场为0,衰减最小,抗干扰最佳,可传输较远的距离。对于TTL的带有对称负信号输出的编码器,信号传输距离可达150米。对于HTL的带有对称负信号输出的编码器,信号传输距离可达300米。
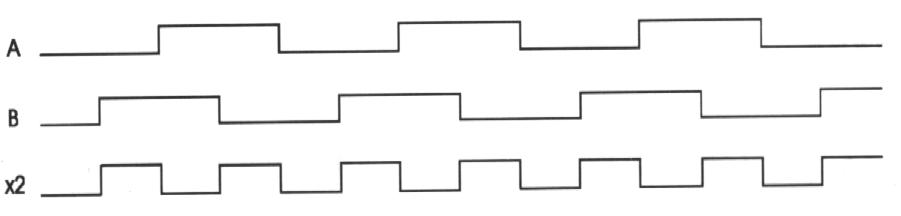
倍频技术信号二倍频 二倍频信号通过A相和B相的”异或”转换获得
分辨率与精度—分辨率是指传感器可以分辨读数的最小单位,而精度是指每个读数与标准位置的最大误差,两者不是一个概念,精度由码盘刻线、转轴同心度、材料的温度特性、电子读数的即时等各方面因数决定。
电子细分技术—利用编码器的正弦波信号的相位变化,由电子设备在一条刻线上再分出多个位置,此为电子细分技术,这样原来的编码器分辨刻线可以成倍的增加,但是细分只是提高了分辨刻线,并没有改变原来的精度。
内插细分—有一些“高分辨数”的编码器是由内插的电子细分以提高每圈的刻线,但是其精度并不高,不能以其提供的高线数而理解成高精度编码器。
内置电池—有一些编码器以内置电池来避免断电的信号丢失,也有一些编码器以单圈是绝对信号,而多圈圈数信号是内置电池与电路用增量计数的方法来获得,此为伪绝对型编码器,其受电池寿命、电池低温失效、受振电池触点不良等因数影响,而大大降低可靠性。
其他主要参数根据需要参看样本:电缆或插座,最大传输距离,最大轴负载,振动,冲击,启动力矩,转子瞬间惯性等
增量式编码器的问题:增量型编码器存在零点累计误差,抗干扰较差,接收设备的停机需断电记忆,开机应找零或参考位等问题,这些问题如选用绝对型编码器可以解决。
增量型编码器的一般应用:测速,测转动方向,测移动角度、距离(相对)。