应用独特的3通道RS-485收发器,显示许多不寻常的功能,可提高电机控制应用中的可靠性和故障检测。MAX3097和MAX3098专为电机轴编码器应用而设计,具有三个差分通道,用于处理光学编码器数据,±15kV ESD保护,共模抑制增强至-10和+13.2V,三个独立的故障报警标志,以及故障安全开路和短路检测。报警标志指示线路开路或短路情况、共模电压范围过大以及信号强度低。
现代工厂使用大型电动机来控制工厂运行所需的机器。为了提高灵活性和准确性,这些电动机有时由处理器控制。控制这些大型电机的电子设备必须设计成这样一种方式,即如果出现问题,电机将安全快速地关闭。未能检测到问题并充分控制电机可能会导致昂贵的设备损坏,以及受伤甚至死亡。MAX3097E/MAX3098E专门设计用于绝对定位控制环路中的电机。这些部件具有独特的功能,可在恶劣的工业环境中实现更安全、更坚固的设计。为了更好地理解MAX3097E/MAX3098E的独特特性,我们首先回顾一下电机控制的基础知识。
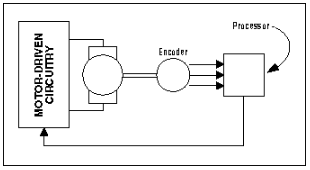
图1.处理器控制的电动机的主要构建模块。
图 1 中的模块包括处理器、电机驱动电路、电动机和编码器。处理器决定电机的驱动力度和驱动位置。电机驱动电路包电力电子含驱动电机所需的所有设备,编码器向处理器提供位置、方向和速度信息,从而闭环。要了解MAX3097E/MAX3098E的工作原理,必须很好地掌握编码器的工作原理。
编码器操作
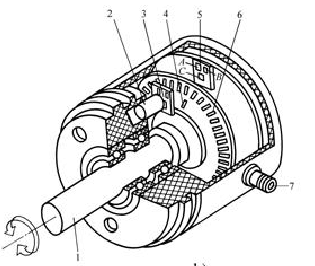
编码器的功能是向处理器提供速度、方向和位置信息。电机编码器可以采用许多不同的形式。MAX3097E/MAX3098E设计用于三路输出编码器工作,该编码器通常采用光学结构。光学编码器的工作原理是通过轮子或标记的圆盘照射光线,该圆盘随电机转动。根据应用和所需的精度,编码器的边缘周围有不同数量的槽/标记。此外,位于下面的另一个插槽用于索引。两个光学传感器的位置使得在主插槽上提供正交信息。最终结果是三个数字输出,通常称为 A、B 和 Z。参见图2。
图2.光学编码器盘。
速度
编码器轮通常每转一圈电机,或者处于齿轮比。因此,来自A和B输出的数字信号的频率与电机的速度成比例变化。例如,将 1000 线编码器直接耦合到以 5000RPM 旋转的电机,产生 83kHz 的频率。因此,通过测量 A 或 B 输出的频率,处理器可以确定电机的速度。
方向
方向可以通过测量A和B输出之间的相位差来确定。在图 2 中,如果 A 在 B 之前上升,则电机沿一个方向转动,或者如果 B 在 A 之前上升,则电机向另一个方向转动。
位置
索引脉冲可用作电机旋转位置的参考点。一旦知道索引脉冲的位置,就可以对A和B输出进行计数,以更准确地确定位置。使用100槽光学编码器,电机轴的位置可以解析到4度以下。
使电子设备远程化
MAX3097E/MAX3098E如何适应图片?这个拼图还缺少一块。在典型的工业设置中,通常需要将所有控制电子设备放在一个中心点,以简化维护和接线问题。以传送带系统为例,传送带可以长达数百英尺,但控制电子设备通常位于机柜本地。这给设计人员带来了一个问题,因为使用这些系统的环境通常是电子噪声的。为了降低噪声,设计人员通常采用通过RS-485器件传输三编码器信号的方法(在本文中,RS-422和RS-485可以互换使用)。RS-485是天然的,因为它对噪音具有很高的抗扰度和长距离行驶的能力。在典型应用中,使用四通道驱动器和接收器:26LS32和26LS31或类似器件,如图3所示。
图3.电机编码器的典型远程安装。
该解决方案比不使用RS-485驱动器的系统更强大。但是,长线路存在问题,MAX3097E/MAX3098E专门设计用于解决,在26LS31和26LS32型器件上,可通过以下方式改进:
高静电保护
更好的共模抑制
故障识别
高静电保护
所有器件均具有ESD保护,但MAX3097E/MAX3098E的保护电平远高于典型值:使用人体模型时为15kV。这意味着ESD事件导致错误的可能性较小,从而导致电机控制器停止正常工作。ESD结构的详细说明超出了本文的范围,但更多信息可以从应用笔记651“I/O端口的ESD保护”中获得。
更好的共模抑制
使用电机编码器的环境通常电气噪声很大。系统内各种接地之间可能会出现共模差异。典型的RS-485器件具有-7V至+ 12V的共模抑制范围。在MAX3097E/MAX3098E中,Maxim将这一范围从-10V扩展至+13.2V。
故障识别
虽然上述优点很有帮助,但MAX3097E/MAX3098E的真正功率在于能够识别和指示电机控制器μP的故障。 查看图 4,请注意有五个引脚,分别标记为 AlarmA、AlarmB、AlarmZ、AlarmD 和 Delay。这些引脚是MAX3097E/MAX3098E独有的,为电机控制器提供发生物理线路错误的信息。一旦电机控制器确定发生了错误,就可以采取适当的措施来确保系统有序安全地关闭。

图4.MAX3097引脚排列
AlarmA、AlarmB 和 AlarmZ 的功能相同,但指示各自导线上的故障。故障D输出是三个信号的OR。此外,它还内置了可编程延迟。此输出应用于全局警报。延迟是为了在信号相互交叉时阻止故障检测器的错误触发。下面描述可以检测的错误以及如何使用MAX3097E/MAX3098E来确定发生了哪些错误。
检测过大的共模范围
如前所述,MAX3097E/MAX3098E的共模范围为-10V至+13.2V。虽然这明显优于典型RS-485器件的共模范围(-7V至+ 12V),但仍有可能超出此范围。如果超出典型RS-485接收器的共模输入范围,则不能依赖它提供正确的输出状态。MAX3097E/MAX3098E也是如此,但相关的报警引脚输出将被驱动为高电平,向处理器表明数据不可靠。参见图 5。
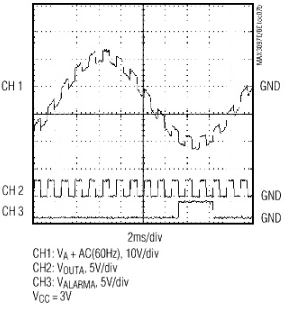
图5.这显示了通道A上由于共模范围过大而导致的故障报警;该故障表示此时间段内的数据可能不可靠。
检测开路输入线
对于任何电缆,电线都可能从连接器中脱落、连接器断裂以及电缆无意中被切断。
通常,接收器连接包含一个终端电阻来抑制反射,如图6所示。通常的值是100Ω或120Ω,具体取决于所用连接电缆的阻抗。
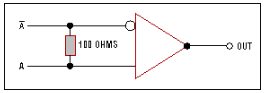
图6.接收器输入连接。
图6显示了电机编码器信号接收器的连接。由于终端电阻的存在,如果A突然断开,则A的电压电平将被拉向A处的电压电平。MAX3097E中有一个门限比较器,如果|,则使故障输出跳闸。VA-A|< 400mV。该技术允许器件检测其中一条线路上是否存在开路。要使这种技术起作用,必须存在终端电阻。因此,终端电阻应与接收器放置在同一板上,而不是连接在外部螺丝端子上,因为端子可能会脱落。
在正常转换期间,信号 A 和 A 有一个交叉时间。这将触发故障比较器,如|VA-A|< 400mV。为避免杂散信号,应使用全局故障输出(故障D)。MAX3097E/MAX3098E在故障D上具有故障消隐功能,确保输出在故障存在固定时间段之前不会切换(用户可通过外部电容设置)。这可确保电机控制器不会因杂散交越信号而受到不必要的中断。
检测短接在一起的输入线
使用长导线和接线端子连接,电线很容易短路在一起。由于RS-485通常通过双绞线传输,因此差分信号可能会短路在一起。
这种情况与开路的情况非常相似,因为如果A和A一起短路,电压差将小于400mV,因此故障输出。
图7.检测差分信号之间的短路。
检测信号强度差
在从编码器到控制电子设备的长距离电缆上,接收端的信号可能小于RS-485和RS-422规定的200mV所需差分信号。例如,可以安装电缆并|接收的输入电平VA-A|安装时可能仅大于200mV。如果随着时间的推移,水分进入电缆,电缆的电容会增加。因此,接收到的输入|VA-A|将降至200mV门限以下。在这种情况下,接收到的数据不能保证,MAX3097E/MAX3098E标记故障情况。如图8所示,检测电路在工作。
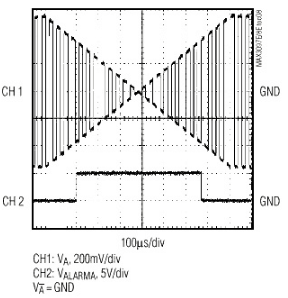
图8.检测信号强度差。
不同的安装需要安全阈值或允许的最大电线长度。为了满足这两种需求,MAX3097E和MAX3098E的信号强度门限不同。在MAX3097E中,低压差分检测以0.4V为中心,以确保小于200mV的信号被标记为故障。在MAX3098E中,该故障门限以0.2V为中心,以确保可以接收到最小电平的信号。这两个元件之间的选择取决于是否需要系统设计发出预警(MAX3097E),或者是否需要实现最大距离(MAX3098E)。