今天主要通过讲一下Elmo的Gold Solo Twitter ,因为这款是很常用的一款型号,主要用到工业机器人、协作机器人,AGV, UGV, RGV,SMT、包装、检验、组装,康复治疗、外科机器人、仿生机器人,机载天线、无人机协作机器人,机器人手臂,工业机器人,所以通过今天的文章可以让你从小白迅速的成为大神。
下面我们先简单的认识一下这款Elmo驱动器。
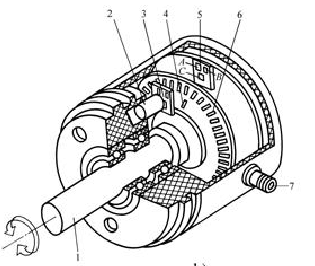
Gold Solo Twitter是一款“随时可用的Gold Twitter”,具有先进的高功率密度、高度智能化的伺服驱动器,可在几分钟内运行,在平均30.59 cm3(1.87 in³)的紧凑封装中提供高达5.6 kW的功率。
Gold Solo Twitter驱动器可以使用Elmo Application Studio(EASII)软件工具轻松设置和调整。作为黄金生产线的一部分,它完全可以使用Elmo运动控制语言进行编程。
如何调试有关软件工具的应用划重点:最好的使用说明仍然是官网的手册以及Elmo驱动器调试软件EASⅡ自带的help文档
注意!
只有合格人员才能安装、调整、维护和维修伺服驱动器。合格人员具有执行运输、组装、安装、调试和操作电机等任务的知识和授权。
Gold Solo Twitter包含静电敏感组件,如果处理不当,可能会损坏这些组件。为防止静电损坏,避免接触高绝缘材料,如塑料薄膜和合成纤维。将产品放置在导电表面上,并自行接地,以释放任何可能积聚的静电。
Elmo Application Studio(EASII)Elmo的应用软件EASII是第二代先进的向导型微调工具,提供灵活,智能和先进的用户友好的工具,易于运动编程的环境。它也提供直观的界面,用于简化复杂先进的运动编程-EASII包含了许多创新功能。
EASII可以配置程序,维持和分析埃尔默伺服驱动器和艺术大师运动控制器的每个特点和功能。
步骤:
启动Elmo Application Studio II 2.5.1.1上位机软件,面板上有哪处不懂的,可以把鼠标放在该处,然后按F1键呼出该处手册说明。
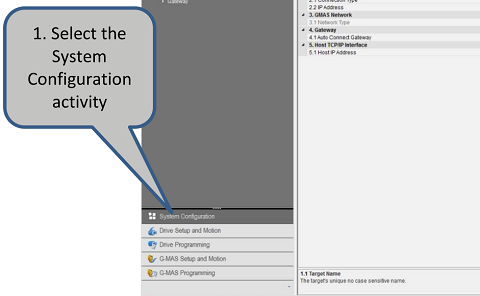
1.首先确定EtherCAT netw节点
选择左下角系统配置的活动
2.从EtherCAT组选择“新”

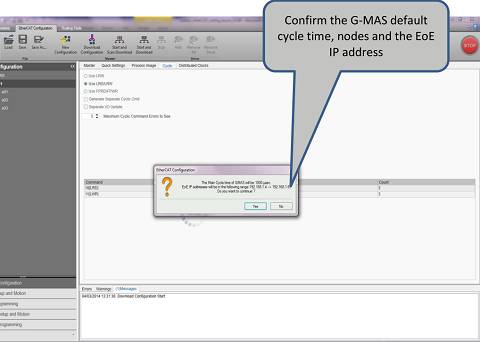
3.弹出消息显示:
确认G-MAS默认周期时间,节点和EoE IP地址
4.所有EtherCAT驱动器自动识别
在G-MAS EtherCAT网络控制器中发现3个轴

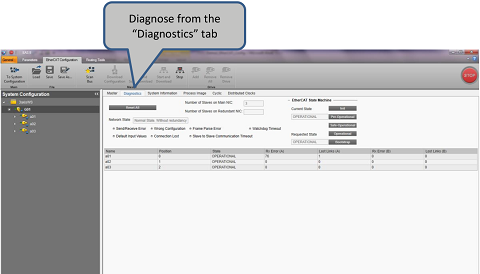
5.诊断通信错误,如果需要改正
诊断的“诊断”选项卡
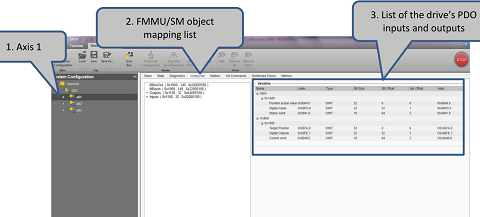
6.选择和地图PDO运动对象
点开轴一的FMMU / SM对象映射列表会出现驱动器列表的PDO输入和输出
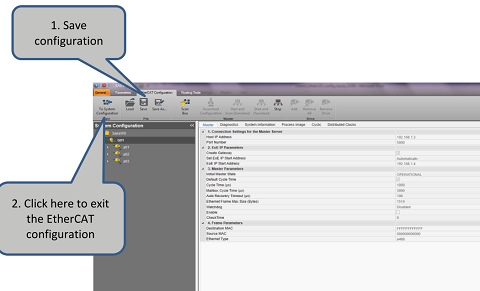
7.保存EtherCAT配置并退出
先点击保存配置然后点击这里退出EtherCAT配置
这些就是我们讲的简单的一些操作步骤!有问题可以联系沟通!